设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:中国科学院|
发表时间:2023-12-04
点击:3591
文章来源: 合肥物质科学研究院
近期,中国科学院合肥物质科学研究院固体物理研究所研究员田兴友和张献团队,受植物卷须启发,利用液态金属微球的光热效应,开发出基于不对称热膨胀的液态金属/聚酰亚胺/聚四氟乙烯(LM/PI/PTFE)可编程光热致动器。该光热致动器在柔性机器人、智能设备和仿生系统领域颇具应用前景。
光热致动器可以将光能通过热能转化为机械能,具有结构简单、构筑方法便捷、光源清洁可持续等特点,因而备受关注。然而,构筑光热致动器的常用光热填料(碳材料和金属微晶)是刚性填料,会降低基底的柔韧性和光热致动器的响应速率。液态金属(LM)作为新兴柔性
不对称热膨胀是构筑光热致动器的基本原理,但未用于构筑可编程液态金属光热致动器。基于不对称热膨胀的液态金属光热致动器无法满足需要多种动作的复杂应用,限制了光热致动器的应用。因此,构筑基于不对称热膨胀的可编程液态金属光热致动器并丰富其动作至关重要。
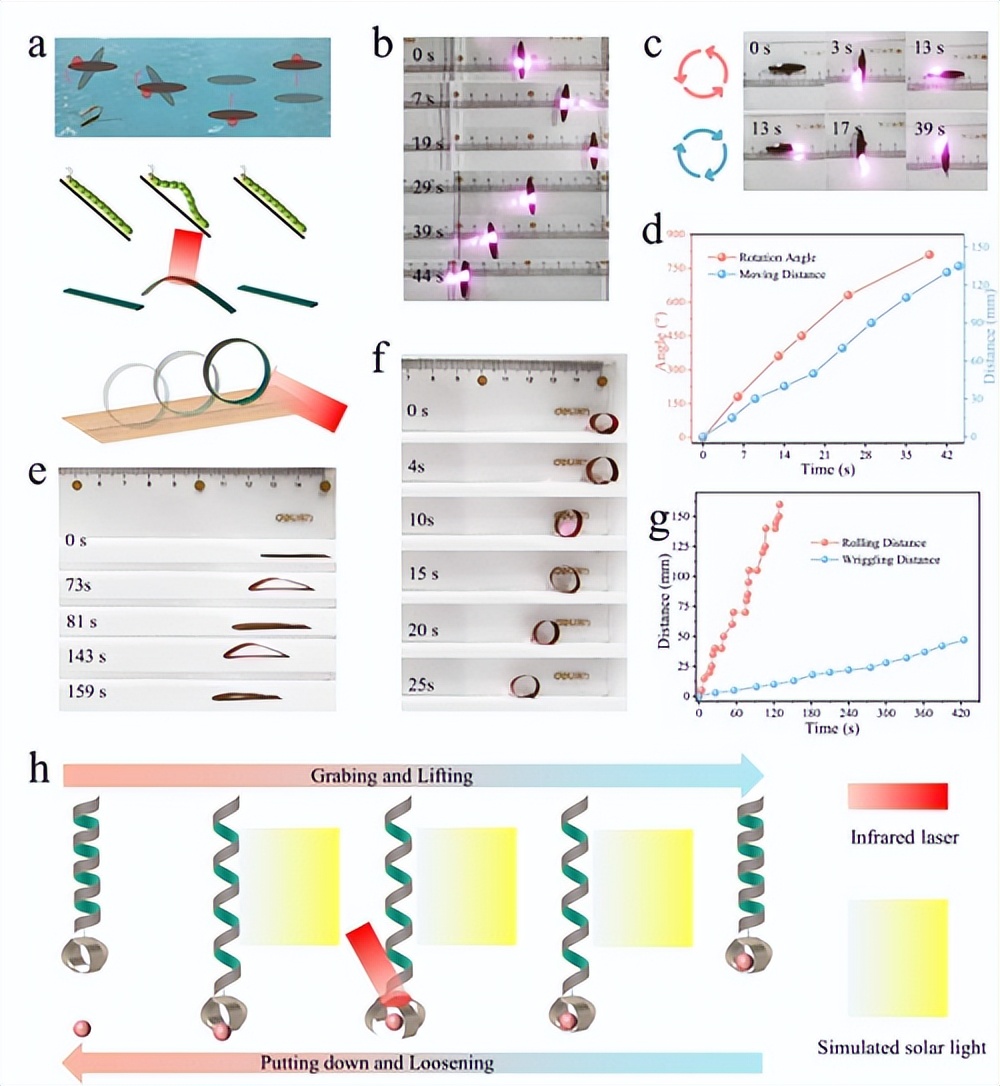
鉴于此,受植物卷须的启发,该研究通过引入聚四氟乙烯(PTFE)带作为可以收缩和弯曲的原生质层,构筑了基于不对称热膨胀的可编程液态金属光热致动器。该可编程液态金属光热致动器具有形变大、响应快、稳定性优异和高承重等优点。研究进一步对该可编程液态金属光热致动器进行建模,并通过有限元分析(FEA)准确预测了弯曲形貌。基于初始形态的可编程性和模型预测,科研人员设计出具有爬行、滚动、游泳、抓取、搬运等多种功能的机器人。这一成果为光热致动器的设计提供了新策略,并使得光热致动器未来在仿生系统和机器人领域的发展应用成为可能。
相关研究成果作为封面文章,发表在《先进功能材料》(Advanced Functional Materials)上。研究工作得到国家自然科学基金、合肥研究院院长基金、中央引导地方科技发展资金的支持。
受植物卷须启发构筑的可编程液态金属光热致动器
基于初始形态的可编程性和模型预测,设计出具有爬行、滚动、游泳、抓取、搬运等多种功能的柔性机器人

[声明]本文来源于互联网转载,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站文章版权归原作者所有,内容为作者个人观点,本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议,如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。