设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:高分子科学前沿|
发表时间:2024-05-15
点击:4359
研究背景:在过去的几十年里,刺激响应型智能材料已在人造肌肉、人造皮肤或软机器人领域得到成功开发。作为其中重要的一种,液晶弹性体(LCE)可以在各种外部刺激(例如温度,光,电等)下做出极其敏感的可逆形变。虽然温度和光是LCE中最为普遍的刺激手段,但是不如电能方便和实用,特别是对于便携式设备和软机器人。因此,电刺激响应LCE(eLCE)吸引了越来越多研究人员的关注。我们课题组最近报道了一种三层结构的双功能电刺激响应液晶弹性体驱动器i-EAD-LCE,(Small
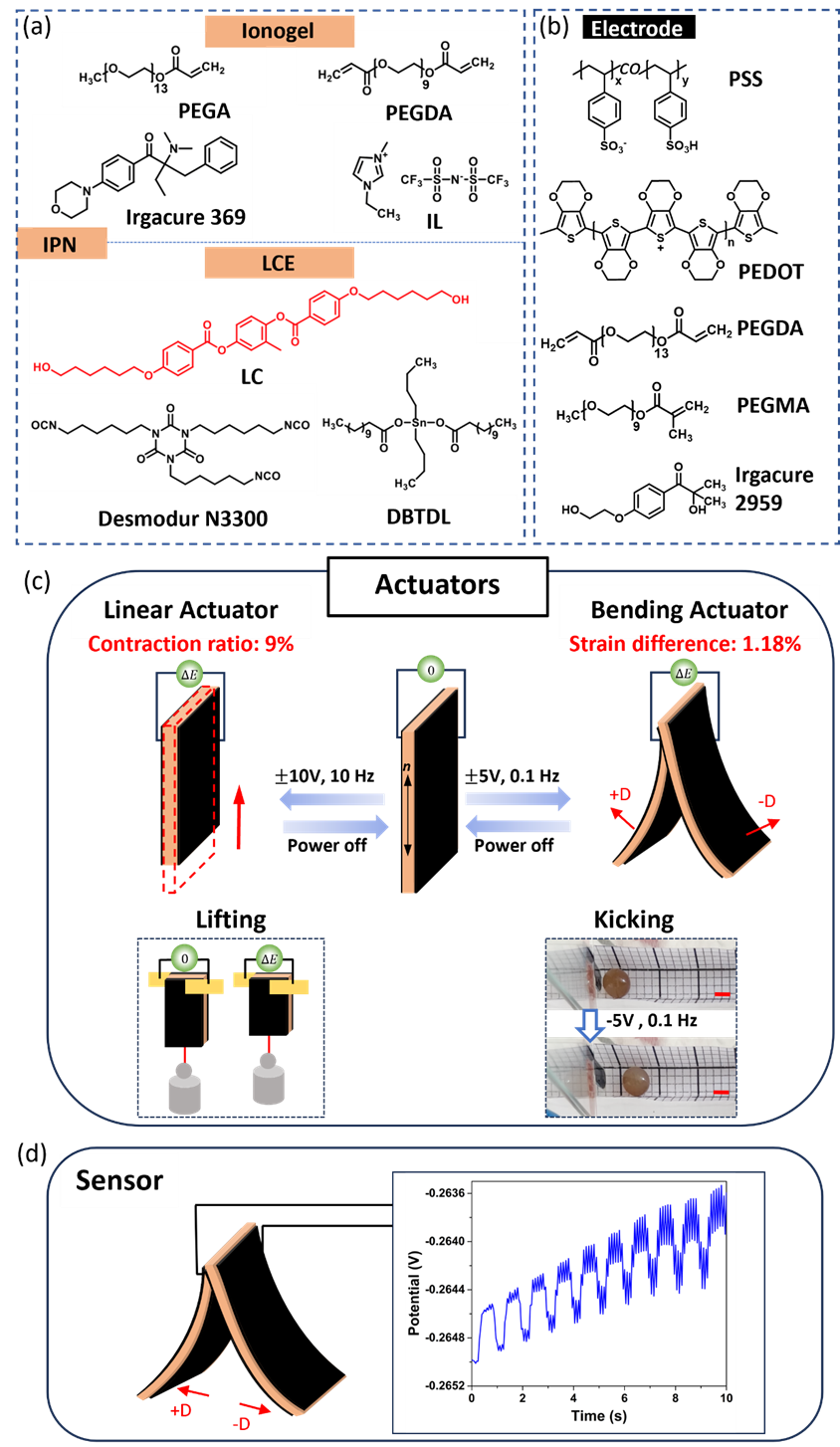
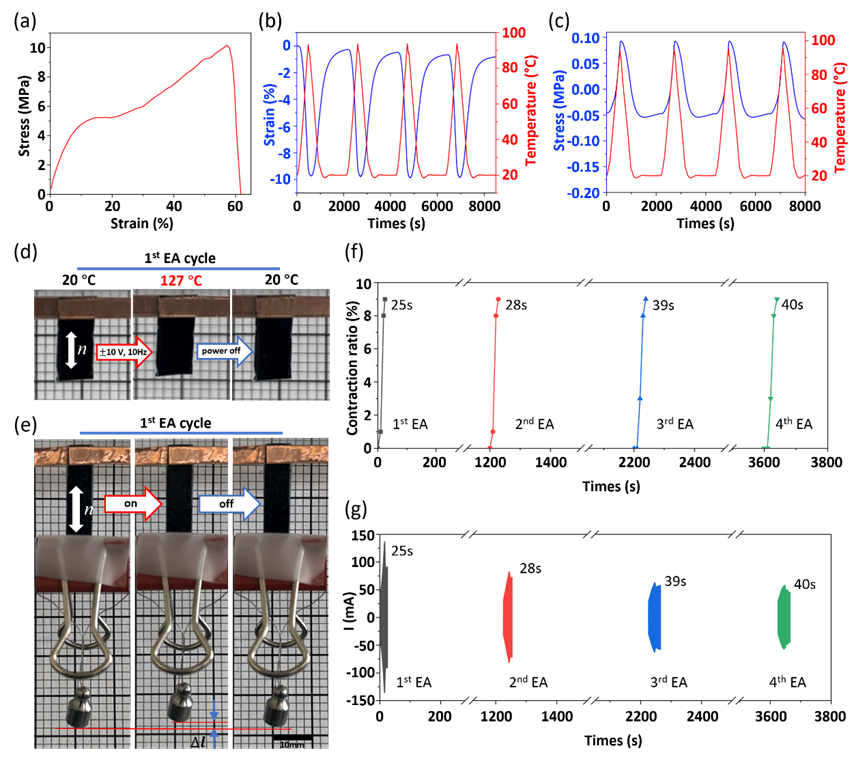
基于以上背景,法国巴黎文理大学巴黎高科化学学院李敏慧教授课题组和巴黎塞尔吉大学合作,通过制备液晶弹性体和离子凝胶的互穿网络并结合三层离子导电高分子智能器件(i-EAD), 成功实现了可调电致双功能驱动器和传感器(i-EAD-IPN-LCE,见图1)。i-EAD-IPN-LCE作为线性驱动器,其杨氏模量、驱动应力和应变分别为51.6 MPa、0.14 MPa和9%,达到骨骼肌的范围。作为弯曲驱动器,输出力为3 mN时,其弯曲形变差为1.18%。并且在9%弯曲形变的机械刺激下,产生 0.4 mV 开路电压,从而能作传感器。因此这种i-EAD-IPN-LCE可用于开发坚固的多自由度电致驱动器和机械传感器。
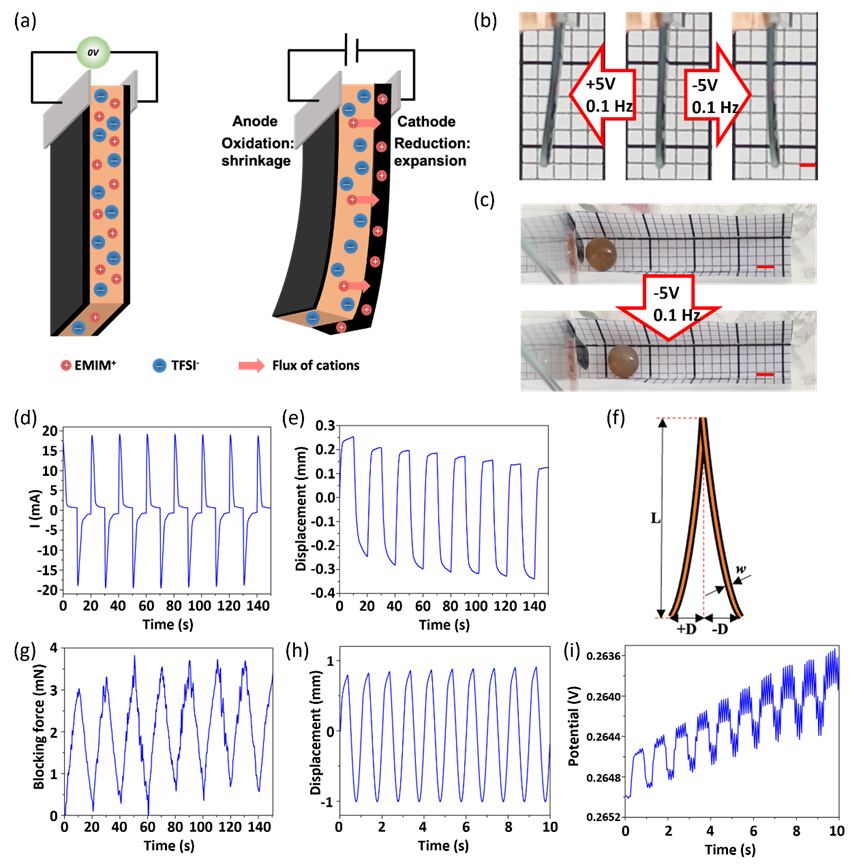
图 1.(a) 制备i-IPN-LCE(Ionogel网络/LCE 网络)薄膜的各组分的化学结构。(b)制备 PEDOT : PSS 电极的各组分的化学结构。(c)三层 i-EAD-IPN-LCE 作为电致线性和弯曲驱动器。橙色中心层代表离子传导 i-IPN-LCE 薄膜(n 表示液晶取向方向),而两个黑色侧层代表 PEDOT:PSS 电极。根据施加的电压和频率(±5 V,0.1 Hz 或 ±10 V,10 Hz),i-EAD-IPN-LCE 会执行线性收缩形变或弯曲形变。它可以作为机械臂提起其自身76倍质量的重物,或模拟高尔夫棒击球(俯视图,比例尺 = 4 mm)。(d) i-EAD-IPN-LCE还可以作为传感器将机械弯曲转换为电信号。
图 3.(a) 电致弯曲原理示意图。(b)i-EAD-IPN-LCE(样品厚度 w = 0.59 mm)在±5V,0.1 Hz电刺激下的弯曲形变照片(比例尺 = 2 mm)。(c)弯曲形变的输出力模拟高尔夫击球(俯视图,比例尺 = 4 mm)。(d) ±5V,0.1 Hz电刺激时电流随时间变化。(e) 由放置在 L = 5 mm 处的激光传感器记录的位移随时间变化。(f) 计算弯曲形变差的关键参数说明。(g) 在 L = 3 mm处,i-EAD-IPN-LCE (w = 0.51 mm) 电致弯曲形变的输出力随时间变化。(h)用于测试 i-EAD-IPN-LCE 作为弯曲传感器的1 Hz、±1 mm正弦位移,。杠杆臂的尖端与 i-EAD-IPN-LCE (w = 0.51 mm) 接触处距夹紧侧的距离 为L = 3 mm。最终对i-EAD-IPN-LCE样品施加的弯曲形变差为9%。(i)显示对机械弯曲刺激响应的开路电压随时间的变化。
这项工作以“Interpenetrating Liquid Crystal Elastomer and Ionogel as Tunable Electroactive Actuators and Sensors”为题发表在《Advanced Functional Materials 》(Adv. Funct. Mater. 2024,2403892, DOI: 10.1002/adfm.202403892)期刊上。法国巴黎文理大学博士生邓亚奎和博士生刘高宇为共同第一作者,法国巴黎文理大学李敏慧教授和巴黎塞尔吉大学的Cédric Vancaeyzeele副教授为共同通讯作者。该工作受到法国国家科研署(French National Research Agency. Grant Number: ANR-22-CE06-0023)和中国国家留学基金委的资助与支持。
封面来源于图虫创意

“本文由新材料在线®平台入驻媒体号高分子科学前沿提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”